Planedaj Ilaraj Motoroj

Paŝa motora planeda skatolo
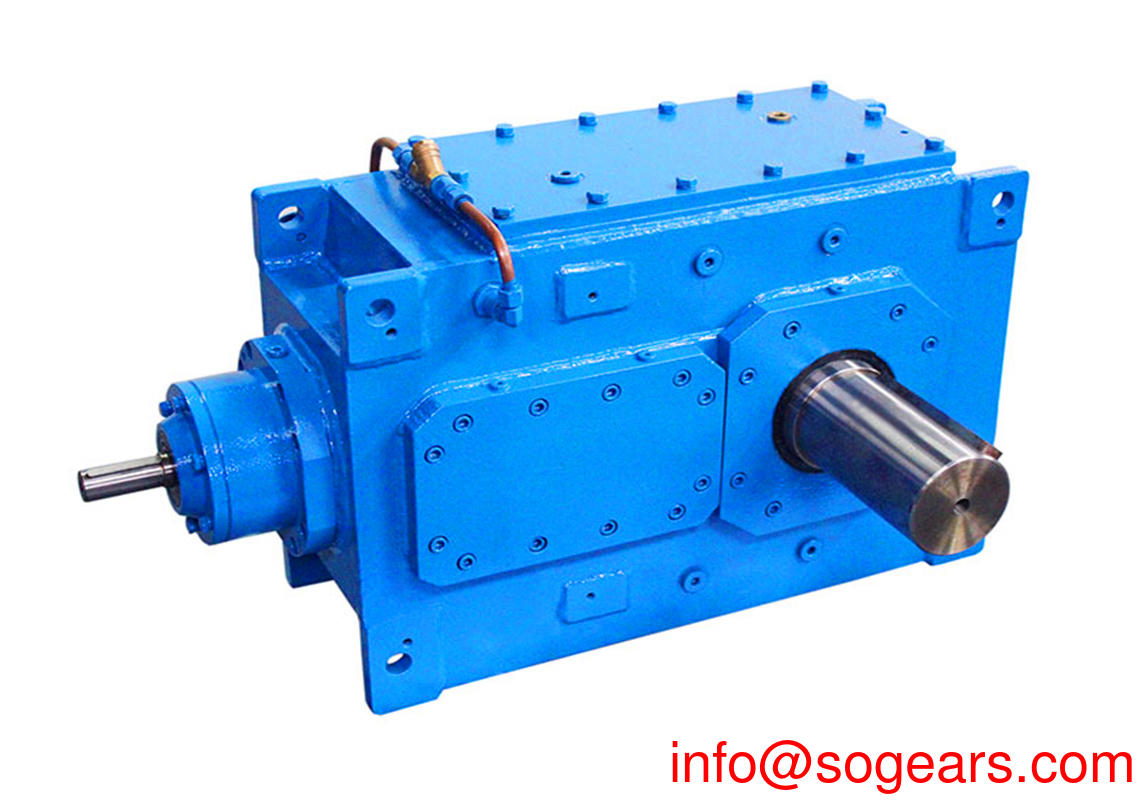
la paŝo-motoro planeda rapidumujo estas ĉefe konstruita per suna ilaro, planeda ilaro, interna ringa ilaro kaj planeda portilo.
Por egale disdoni la ŝarĝojn de la tri planedaj radoj, oni uzas dentan flosantan mekanismon, tio estas, la sunan ilaron aŭ la planedan portanton flosas, aŭ ambaŭ la sunan ilaron kaj la planedan portilon flosas samtempe. La dentaĵoj en la planeda rapidumujo estas laŭ rektodenta involuto cilindraj dentaĵoj. Havas la jenajn karakterizaĵojn:
- Malgrandega kaj malpeza. En la samaj kondiĉoj, ĝi estas 1/2 aŭ pli malpeza ol la ordinara involuta cilindra rapidumujo, kaj la volumeno estas 1/2 ĝis 1/3.
2, la transdona efikeco estas alta: unutapa paŝa motora planeda rapidumujo atingas 97% ~ 98%; du-ŝtupa paŝo-motoro planeda rapidumujo atingas 94% ~ 96%; tri-ŝtupa paŝomotora planeda rapidumujo 91% ~ 94%.
3, la transdona potenca gamo estas granda: povas esti de malpli ol 1KW ĝis 1300KW, aŭ eĉ pli granda.
4, la transdona gamo estas granda: i = 2.8 ~ 2000
5, adaptebleco kaj fortikeco. La ĉefaj partoj estas faritaj el altkvalita alojŝtalo per karburado kaj estingado aŭ nitrurado. La paŝmotora planeda rapidumujo funkcias glate, kun malmulta bruo kaj estas uzata pli ol 10 fojojn.
6, uzo kaj aplikeblaj kondiĉoj

la paŝo-motoro planeda rapidumujo havas tri horizontalajn seriojn (NGW11-NGW121) kaj du nivelojn (NGW42-NGW122) tri (NGW73-NGW123). Ĝi estas ĉefe uzata en maŝinaro kaj ekipaĵo por metalurgio, minado, levado kaj transportado, kaj ĝi ankaŭ povas esti uzata por elektrodissendo sub aliaj similaj industriaj kaj minindustriaj kondiĉoj.


Servo-planeda rapidumujo taksita eniga rapideco ĝis 18000 RPM (ĉirkaŭ paŝmotora planeda rapidumujo mem grandeco, des pli granda estas la paŝomotora planeda rapidumujo, des pli malgranda estas la taksita eniga rapideco) supre, industri-nivela servoplaneda rapidumujo-eliga tordmomanto ĝenerale ne pli ol 2000 nm, speciala granda tordmomanto servo planeda skatolo povas fari pli ol 10000 nm. Labora temperaturo en 25 ℃ ĝis 100 ℃ aŭ tiel, ŝanĝante la grason povas ŝanĝi ĝian funkcian temperaturon.
La funkcia temperaturo de la servo-planeda skatolo estas ĝenerale de -25 ℃ ĝis ĉirkaŭ 100 ℃. La maksimuma eniga rapido povas atingi 18000 rpm laborejon. La akumula labortempo de la taksita eniga rapido estas zbj19004-88 kaj zbj19026-90-bruo ≤70 db
dosierujo
1 paŝo-motora planeda rapidumujo
2 instalmetodo
3 gravaj parametroj
4 la koncepto
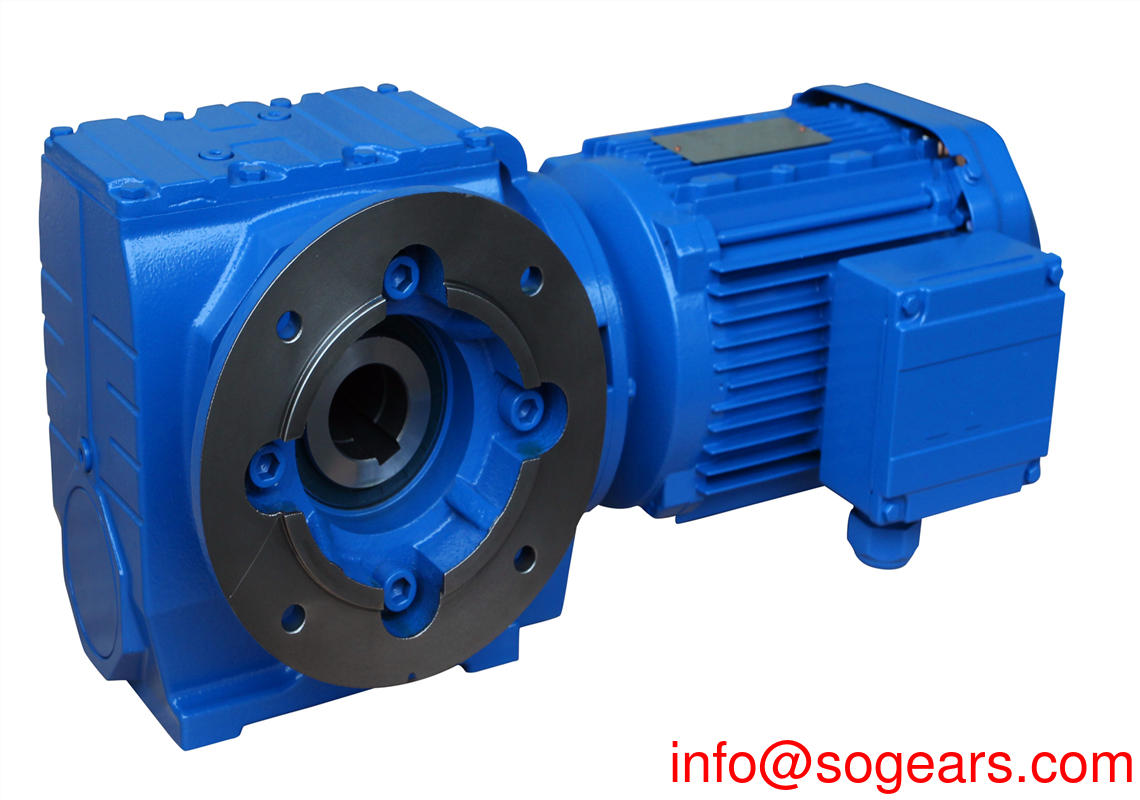
paŝo-motoro planeda rapidumujo

La ĉefa transdona strukturo estas: planeda rado, suna rado, ekstera ilara ringo.Kompare kun aliaj reduktaj iloj, servo-motora redukta ilaro havas altan rigidecon, altan precizecon (ununura stadio povas atingi malpli ol 1 poenton), (duobla stadio povas atingi malpli ol 3 poentojn), alta transdona efikeco (ununura stadio en 95-99%) , alta tordmomanto / volumo, senvivaj funkcioj.
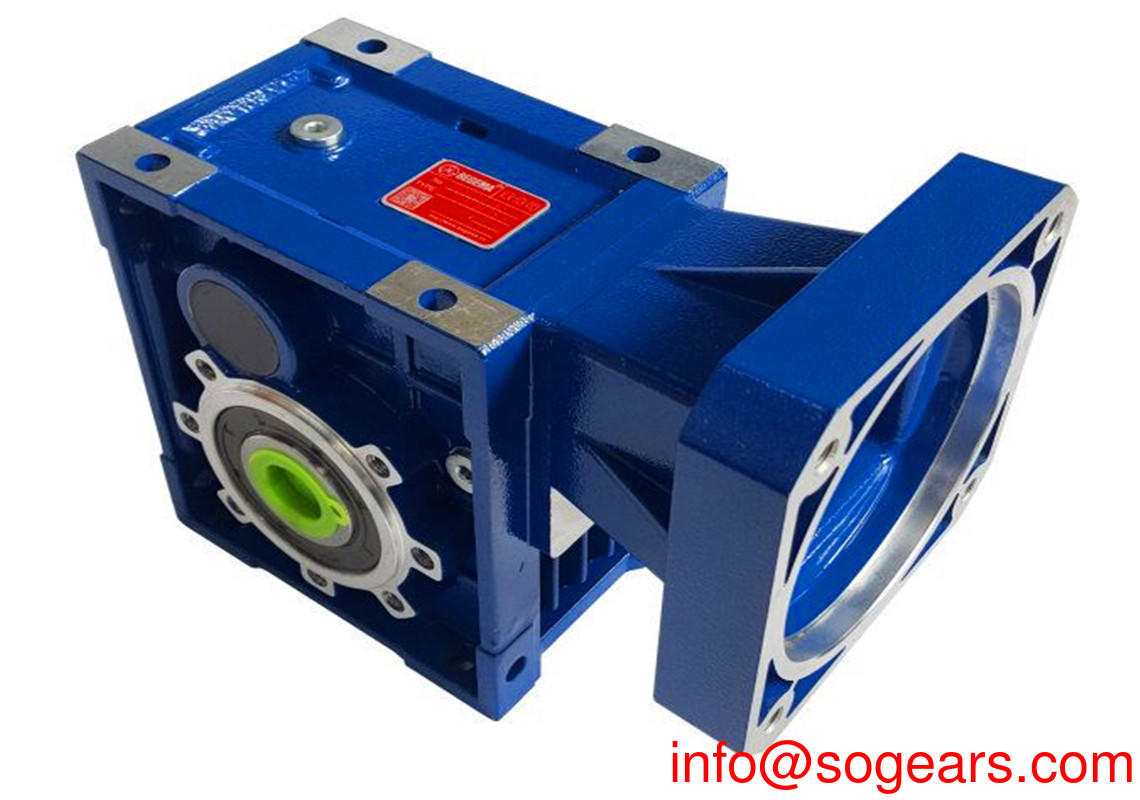
Pro ĉi tiuj karakterizaĵoj, servo-planeda skatolo estas plejparte instalita en la paŝa motoro kaj servo-motoro aŭ senbrosa motoro, uzata por redukti la rapidon, plibonigi la tordmomanton, kongruante kun inercio.
Taksita eniga rapideco de servo-planeda rapidumujo povas atingi ĝis 18000 rpm (rilate al la grandeco de la paŝo-motora planeda rapidumujo mem, ju pli granda estas la paŝopova planeda rapidumujo, des pli malgranda estas la taksita eniga rapideco) supre, la eliga paro de industria grado servo-planeda rapidumujo ĝenerale ne superas 2000Nm

instalado metodo
Ĝusta instalado, uzo kaj prizorgado de paŝmotora planeda rapidumujo estas grava ligo por certigi la normalan funkciadon de mekanika ekipaĵo.Sekve, kiam vi instalas la paŝan motoran planedan skatolon, bonvolu nepre strikte sekvi la sekvan instaladon kaj uzon de rilataj aferoj, zorge kunmeti kaj uzi.
La unua paŝo estas konfirmi ĉu la planeda skatolo de motoro kaj paŝo-motoro estas en bona stato antaŭ la instalado, kaj strikte kontroli ĉu la grandeco de ĉiu parto konektita kun la planeda skatolo de motoro kaj paŝo-paŝo kongruas. Jen la grandeco kaj kongrua toleremo de la pozicia estro, eniga ŝafto kaj paŝa motoro planeda rapidumujo-kanelo de la motoro.
Paŝo 2: malŝraŭbu la ŝraŭbon sur la ekstera polvorezista truo de paŝa motora planeda rapidumujo, agordu la kunpreman ringon de PCS-sistemo por vicigi la flankan truon kun la polvorezista truo, enmetu la internan sesangulon por streĉi.Post tio, forigu la ŝlosilojn de la motora ŝafto.La tria paŝo estas konekti la motoron kun la paŝo-motoro planeda skatolo nature.La koncentreco de la eliga ŝafto de la planeda rapidumujo de la paŝmotoro kaj la eniga ŝafto de la motoro devas esti konsekvenca kiam konektita, kaj la ekstera flanĝo de la du devas esti paralela.Se la koncentreco ne kongruas, la motora ŝafto rompiĝos aŭ paŝa motora planeda rapidumujo.Krome, en la instalado, ne uzu martelon kaj aliajn batojn, malhelpu la aksan forton aŭ radian forton tro da damaĝo al la lagro aŭ ilaro.


Nepre streĉu la muntan riglilon antaŭ ol streĉi la fortan riglilon.Antaŭ la instalado forviŝu la kontraŭrustan oleon de motora eniga ŝafto, poziciigante estron kaj konektantan parton de paŝo-motora planeda skatolo kun benzino aŭ zink-natria akvo.Ĝia celo estas certigi streĉan ligon kaj flekseblecon de operacio, kaj malhelpi nenecesan eluziĝon.Antaŭ ol la motora kaj paŝa motora planeda rapidumujo estas konektitaj, la ŝafta ŝlosila motoro devas esti perpendikulara al la streĉa riglilo.Por certigi unuforman forton, unue ŝraŭbu la instalajn riglilojn ĉe iu diagonala pozicio, sed ne streĉu, tiam ŝraŭbu la instalajn riglilojn ĉe la aliaj du diagonalaj pozicioj, kaj fine ŝraŭbu la kvar instalajn riglilojn unu post la alia.Fine streĉu la fortan riglilon.Ĉiuj streĉaj rigliloj devas esti fiksitaj kaj kontrolitaj per la tordoplata mano laŭ la indikitaj tordmomaj datumoj.
Ĝusta instalado inter paŝmotora planeda rapidumujo kaj mekanika ekipaĵo samas al ĝusta instalado inter paŝmotora planeda rapidumujo kaj veturila motoro.La ŝlosilo estas certigi, ke la elira ŝafto de la planeda rapidumujo de la paŝo-motoro kaj la veturiga parto de la ŝafta samcentro.
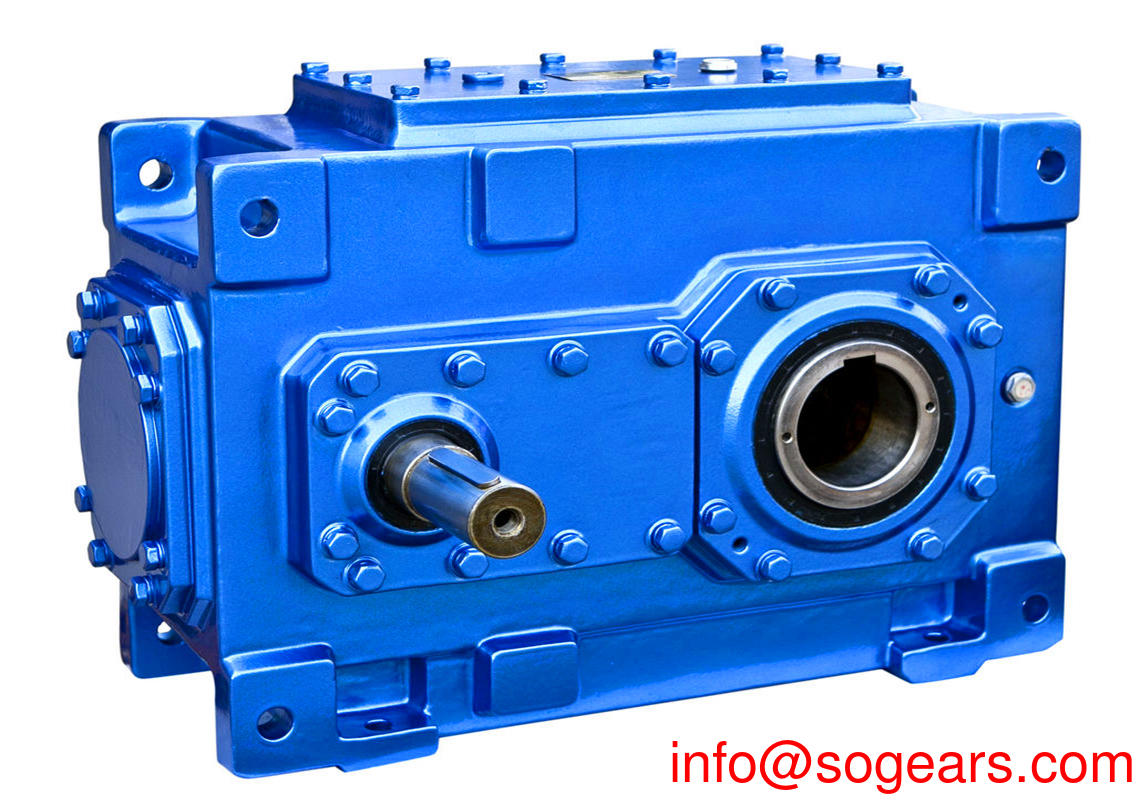
Grava parametro
Malrapidiĝa rilatumo: rilatumo de eniga rapideco kaj eliga rapideco.
Serio: nombro da aroj de planedaj iloj.Ĝenerale la maksimumo povas atingi tri, efikeco reduktiĝos.
Efikeco de plena ŝarĝo: efikeco de transdono de paŝo-motora planeda rapidumujo sub maksimuma ŝarĝo (eliga tordmomanto de kulpa halto)
Laborvivo: la akumula labortempo de la paŝmotora planeda rapidumujo kun taksita ŝarĝo kaj taksita eniga rapideco.
Taksita tordmomanto: ĝi estas la tordmomanto, kiun la taksita vivo permesas longan daŭron.Kiam la elirrapideco estas 100 r / min, la vivo de la planeda rapidumujo de poŝtelefona motoro estas la averaĝa vivo, preter ĉi tiu valoro, la averaĝa vivo de la planeda rapidumujo de poŝtelefona motoro estos reduktita.La paŝmotora planeda rapidumujo malsukcesas kiam la eliga tordmomanto superas dufoje.
Bruo: unuo dB (A), ĉi tiu valoro estas la eniga rapido de 3000 r / min, sen ŝarĝo, 1 m for de la mezurita valoro de planeda rapidumujo.

Serio: la nombro de aroj de planedaj ilaroj. Ĉar unu aro de planedaj ilaroj ne povas plenumi la postulojn de pli granda transdona proporcio, kelkfoje du aŭ tri aroj necesas por plenumi la postulojn subteni pli grandan transdonaĵon. Pro la pliiĝo de la nombro de planedaj ilaroj, la longo de la dua aŭ tria paŝo-motora planeda skatolo pliiĝos kaj la efikeco malpliiĝos.
Revena senigo: kiam la eliga fino estas fiksita kaj la eniga fino turniĝas dekstrume kaj maldekstrume por produkti taksitan tordmomanton + -2% ĉe la eniga fino, estas eta angula movo ĉe la eniga fino de la paŝmotora planeda rapidumujo, kiu estas la redona rajtigo.
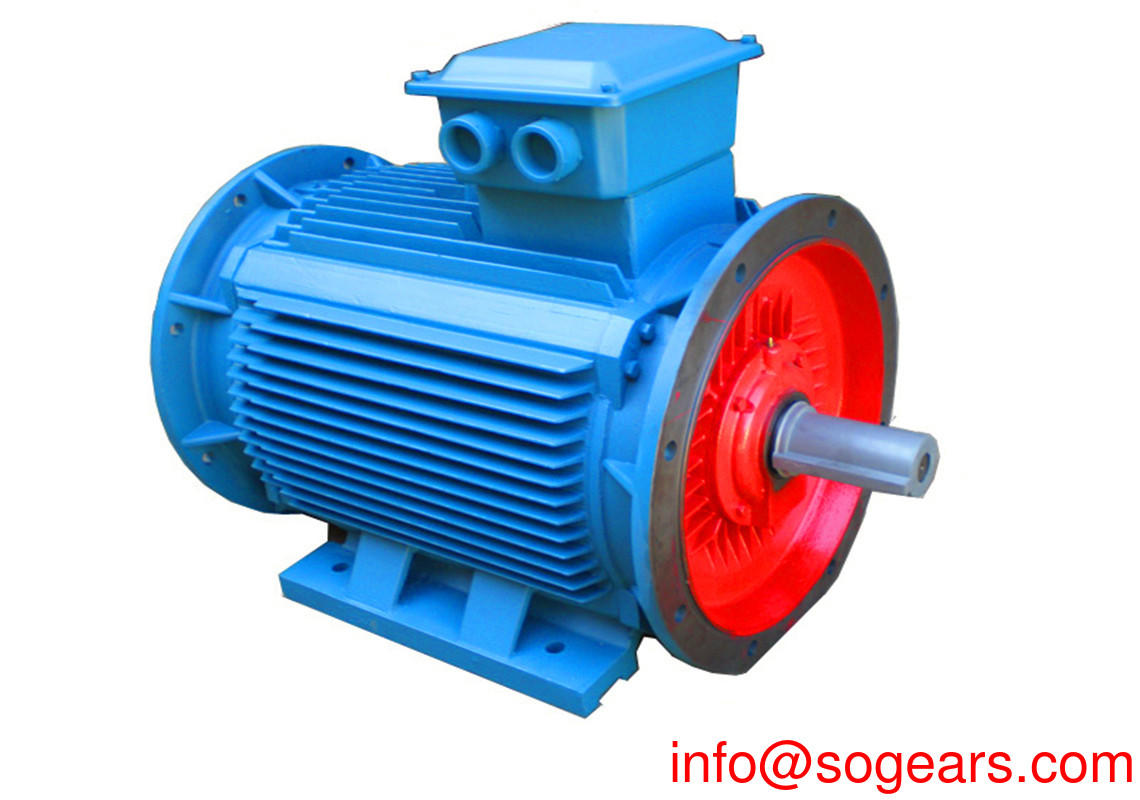
Servomotoro estas motoro kiu regas la mekanikajn erojn funkciantajn en servosistemo. Ĝi estas nerekta rapidŝanĝilo de aldona motoro.

Servomotoro povas kontroli la rapidon, pozicia precizeco estas tre preciza, tensia signalo povas esti konvertita en tordmomanton kaj rapidecon por stiri la kontrolobjekton.La rotora rapido de la servomotoro estas kontrolita de la eniga signalo kaj povas respondi rapide. Ĝi estas uzata kiel plenuma elemento en la aŭtomata regosistemo kaj havas la karakterizaĵojn de malgranda elektromekanika tempokonstanto, alta lineareco kaj starttensio, ktp. La ricevita elektra signalo povas esti konvertita en la angulan delokiĝon aŭ angulan rapidan eliron de la motora ŝafto.Dividitaj en servomotorojn kontinentajn kaj alternajn, ĝiaj ĉefaj karakterizaĵoj estas, ke kiam la signala tensio estas nula, ne ekzistas rotacia fenomeno, rapideco kun la kresko de la tordmomanto kaj unuforma malkresko.
La bazaj informoj
Ĉina nomo
Servo-motoro
Fremdaj nomoj
Servo-motoro
tipo ekipaĵo
Uzu okazojn
Aŭtomata regsistemo

dosierujo
1 funkcia principo
2 disvolva historio
3 elekta komparo
4 elpuriga metodo
5 agokomparo
6 elekta kalkulo
7 bremsa reĝimo
8 punktoj por atento
9 komparo de karakterizaĵoj
10 uzokampo
11 ĉefaj funkcioj
12 avantaĝoj
Faldi redaktu ĉi tiun sekcion funkcianta principo
1. Serva mekanismo estas uzata por fari la pozicion, orientiĝon,

Aŭtomata kontrolsistemo en kiu la produktaĵo kontrolis kvanton, kiel ekzemple la ŝtato, povas sekvi arbitrajn ŝanĝojn en la eniga celo (aŭ antaŭfiksita valoro).Servo-poziciigado per pulso, esence povas kompreni ĝin, servo-motoro por ricevi pulson, rotacios unu premon de la responda vidpunkto, por realigi la delokiĝon, ĉar, la funkcio de la servomotoro mem havas pulson, do ĉiu rotacia Angulo de servo-motoro, tiel sendu la respondan nombron de pulsoj, kaj la servo-motoro por akcepti pulson formantan la eoon, aŭ fermitan buklon, sekve la sistemo scios kiom da pulsoj senditaj al la servo-motoro , kiom da ŝarga pulso ree samtempe, tiamaniere, povas esti tre preciza kontrolo de la motora rotacio, por realigi precizan pozicion, povas atingi 0.001 mm.Dc-servomotoro estas dividita en brosan kaj senbrosan motoron.Brosa motoro malmultekosta, simpla strukturo, granda starta tordmomanto, larĝa rapideco, facile regebla, bezonas prizorgadon, sed prizorgado ne estas oportuna (karbona broso), elektromagneta interfero, mediaj postuloj.Ĝi do povas esti uzata en kostosentemaj ĝeneralaj industriaj kaj civilaj aplikoj.



Senbrosa motoro malgranda grandeco, malpeza, granda produktaĵo, rapida respondo, alta rapido, malgranda inercio, glata rotacio, stabila tordmomanto.La kontrolo estas kompleksa, facile realigebla inteligenteco, kaj la elektronika komutado estas fleksebla, kiu povas esti kvadrata komutacio aŭ sinuso-komutado.Senprizorgaj motoroj, alta efikeco, malalta funkcia temperaturo, malgranda elektromagneta radiado, longa vivo, povas esti uzataj en diversaj medioj.
2, ac-servo-motoro estas senbrosa motoro, dividita en sinkrona kaj nesinkrona motoro, la aktuala movado-rego estas ĝenerale uzata sinkrona motoro, ĝia potenca gamo estas granda, povas fari multan potencon.Alta inercio, malalta maksimuma rotacia rapido, kaj kun la kresko de potenco rapide malpliiĝas.Tial ĝi taŭgas por malalta rapido kaj glata funkciado.
3. La rotoro ene de la servomotoro estas konstanta magneto. La trifaza elektro kontrolita de la ŝoforo, U / V / W, formas elektromagnetan kampon.La precizeco de servomotoro dependas de la precizeco de kodilo (linia nombro).
La disvolva historio
Ekde la Indramat-divido de la Rexroth-kompanio de Germanio MANNESMANN en 1978 Hanovra foiro

MAC-permanenta magneta ak-servo-motoro kaj sistemo de funkciigo estis oficiale enkondukitaj en Ŝanhajo, kio markis, ke ĉi tiu nova generacio de ak-servo-teknologio eniris la praktikan stadion.De la meza kaj malfrua 1980-aj jaroj, kompanioj havis kompletan gamon de produktoj.La tuta servo-merkato transiris al alternativaj sistemoj.Fruaj simulaj sistemoj kiel nula drivo, kontraŭ-interfero kaj fidindeco, precizeco kaj fleksebleco, kaj ankaŭ nesufiĉaj, ne plenumas la postulojn de movado-kontrolo, dum la lastaj jaroj kiel la mikroprocesoro, la apliko de nova tipo cifereca signal-procesilo (DSP) ), cifereca regsistemo, la regparto povas esti plenumita per programaro, nomata dc-servo-sistemo, trifaza konstanta magneta servo-servo.

Ĝis nun plej multaj elektraj servosistemoj de alta rendimento adoptas permanentajn magnetajn sinkronajn alternajn servomotorojn, dum la plej multaj el la regilaj ŝoforoj adoptas rapidajn kaj precizajn servosistemojn de cifereca pozicio.Tipaj fabrikantoj inkluzivas Siemens de Germanio, kohlmorgen de Usono kaj panasonic kaj yaskawa de Japanio.
La malgranda alterna servo-motoro kaj ŝoforo estas produktitaj de yaskawa-motoro en Japanio. Inter ili, D-serio taŭgas por CNC-maŝiniloj (maksimuma rapideco estas 1000r / min, tordmomanto estas 0.25 ~ 2.8nm), kaj R-serio taŭgas por robotoj (maksimuma rapideco estas 3000r / min, tordmomanto estas 0.016 ~ 0.16nm).Post tio, ses serioj de M, F, S, H, C kaj G estis lanĉitaj.La novaj serioj D kaj serio R estis enkondukitaj en la 1990-aj jaroj.De la malnova serio de rektangula ondotransporto, 8051 MCU-kontrolo ĝis sinusoidala ondotransportilo, 80C, 154CPU kaj pordega tabela blato-kontrolo, tordmomanta fluktuo de 24% ĝis 7%, kaj plibonigas la fidindecon.Tiamaniere nur kelkajn jarojn por formi ok seriojn (potenca gamo de 0.05 ~ 6kW) relative kompletan sistemon, por renkonti la funkciantan maŝinaron, manipulan mekanismon, veldajn robotojn, kunigajn robotojn, elektronikajn komponantojn, prilaborajn maŝinojn, presilon, alt- Rapida serpentuma maŝino, serpentuma maŝino kaj aliaj malsamaj bezonoj.
Fanuc, japana kompanio konata pro produktado de CNC-maŝiniloj, ankaŭ lanĉis s-seriojn (13 specifoj) kaj l-seriojn (5 specifoj) permanentajn magnetajn servomotorojn meze de la 1980-aj jaroj.La serio L havas malgrandan inercian momenton kaj mekanikan tempokonstanton, kaj taŭgas por poziciaj servosistemoj, kiuj postulas specialan rapidan respondon.

Aliaj japanaj fabrikantoj, kiel mitsubishi-motoroj (hc-kfs, hc-mfs, hc-sfs, hc-rfs kaj hc-ufs-serioj), Toshiba seiki (SM-serio), okuma ferfabriko (BL-serio), sanyo elektra (BL serioj), kaj rishi elektra (S-serio), ankaŭ eniris la konkurson de permanenta magneta servo.
La servomotoroj AC-serioj MAC de Indramat-divido de Rexroth havas 7 framgrandecojn kaj 92 specifojn
La IFT5-serioj trifazaj permanentaj magnetaj alternativaj servomotoroj de Siemens estas dividitaj en norman tipon kaj mallongan tipon

Servomotoro de akc-motoro kaj senbrosa dc-servo-motoro en la funkcio de la diferenco: akv-servo estas pli bona, ĉar ĝi estas sinuso-kontrolo, tordmomanta ondeto estas malgranda.Dc-servo estas trapezoidala ondo.Sed dc-servo estas pli simpla kaj malmultekosta.
La maksimuma rapideco de la altrapida ŝafto ne superas 1500r / min
La ekstercentra rapideco de la ilaro ne superas 10m / s;
Labormedio temperaturo estas -40 ° C -45 ° C;
Ĝi povas esti funkciigita en ambaŭ antaŭaj kaj inversaj direktoj.

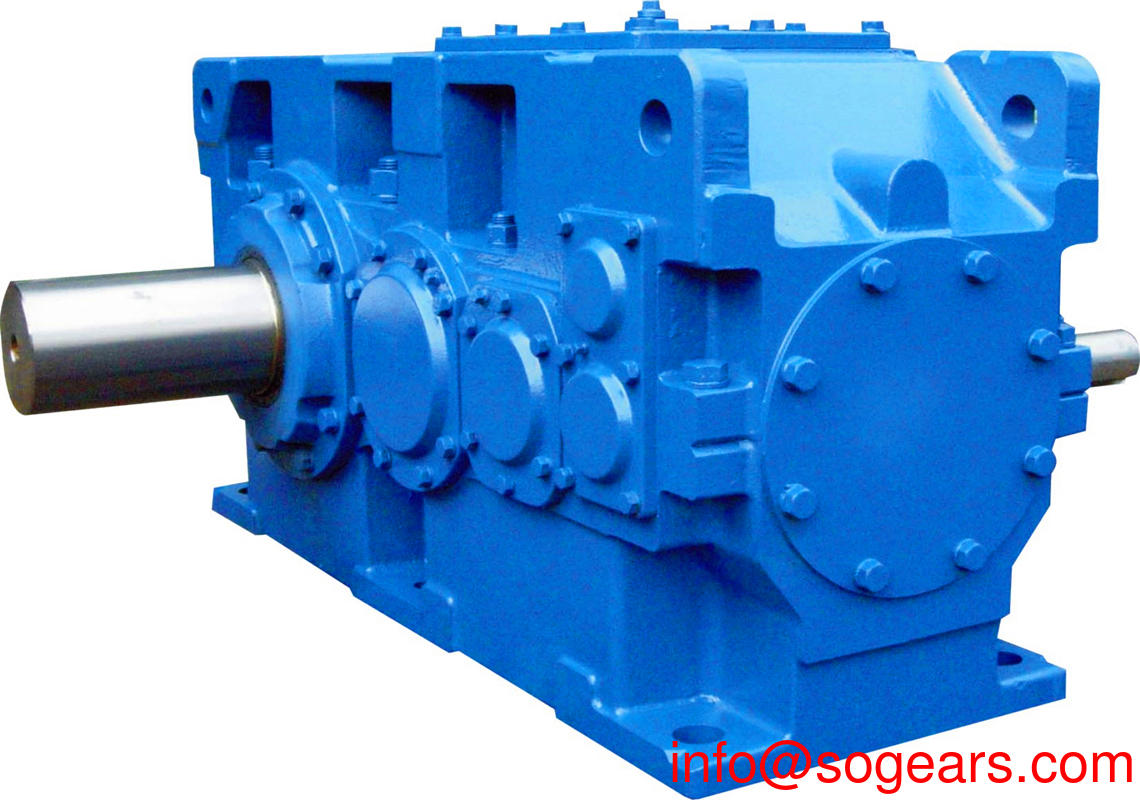
paŝo-motoro planeda rapidumujo specifaĵoj:
NGW-unupaŝa paŝmotora planeda rapidumujo: NGW11, NGW21, NGW31, NGW41, NGW51, NGW61, NGW71, NGW81, NGW91, NGW101, NGW111, NGW121
NGW-du-ŝtupa paŝomotora planeda rapidumujo: NGW42, NGW52, NGW62, NGW72, NGW82, NGW92, NGW102, NGW112, NGW122
NGW-tri-ŝtupa paŝomotora planeda rapidumujo: NGW73, NGW83, NGW93, NGW103, NGW113, NGW123



Specifoj de planeda rapidumujo NGW:
La specifoj de la paŝo-motoro planeda rapidumujo estas dividitaj en 12 framajn nombrojn laŭ la transmisioproporcio, potenco kaj tordmomanto, kaj unutazaj, duoble-etapaj kaj tri-fazaj dissendoj. Estas 27 framaj nombroj kaj 58 rapidaj rilatoj. La detaloj estas jenaj:
paŝo-motoro planeda rapidumujo estas dividitaj en unusupajn, duoble-ŝtupajn kaj tri-fazajn dissendojn: unufazaj modeloj estas: NGW11-paŝomotora planeda rapidumujo NGW21, NGW31, NGW41, NGW51 paŝomotora planeda rapidumujo NGW61, NGW71, NGW81, NGW91 paŝomotora planeda rapidumujo NGW101 , NGW111, NGW121;

Elpurigi metodon
1. Komencaj parametroj
Antaŭ cableado, pravalorizi la parametrojn.
Sur la kontrola karto: elektu la regan reĝimon;Restarigu PID-parametrojn al nulo;Malŝaltu la ebligan signalon defaŭlte kiam la kontrola karto estas ŝaltita;Konservu ĉi tiun staton por certigi, ke la kontrola karto troviĝas en ĉi tiu stato, kiam ĝi ree funkciigas.
Sur la servo-motoro: agordi la regan reĝimon;Agordu por ebligi eksteran kontrolon;Rapidumo de kodiga signala eligo;Agordu la proporcian rilaton inter la kontrola signalo kaj la motora rapido.Ĝenerale oni rekomendas, ke la maksimuma projekcia rapido de la servo-funkciado respondu al la kontrola tensio de 9V.Ekzemple, yamyang agordas la rapidon respondan al 1V-tensio kaj la fabrika valoro estas 500. Se vi nur volas, ke la motoro funkciu sub 1000 RPM, starigu ĉi tiun parametron al 111.


2, konekto
Malŝaltu la kontrolkarton kaj konektu la signalan linion inter la kontrola karto kaj la servo.La jenaj linioj devas esti konektitaj: analoga eliga linio de kontrola karto, ebligi signalan linion, kodan signalan linion de servo-eliro.La motoro kaj la kontrolkarto (same kiel la komputilo) estas funkciigitaj post kiam la drataro estas denove kontrolita por esti ĝusta.Je ĉi tiu punkto la motoro devas esti senmova kaj povas esti facile turnata de eksteraj fortoj. Se ne, kontrolu la agordon kaj kabligon de la ebliga signalo.Turnu la motoron kun ekstera forto, kontrolu ĉu la kontrola karto povas ĝuste detekti la ŝanĝon en la pozicio de la motoro, alie kontrolu la kabligon kaj agordon de la koda signalo

3. Provu la direkton
Por fermita bukla kontrolsistemo, se la reagsignalo ne estas en la ĝusta direkto, la konsekvencoj devas esti katastrofaj.Ebligu signalon por ŝalti servon per kontrola karto.Ĉi tiu servo devas rotacii malpli rapide, kio estas la legenda "nula drivo".Estas instrukcioj aŭ parametroj sur la kontrola karto por subpremi nulan drivadon.Uzu ĉi tiun instrukcion aŭ parametron por vidi ĉu la rapideco kaj direkto de la motoro povas esti kontrolitaj per ĉi tiu instrukcio (parametro).Se ĝi ne povas esti kontrolita, kontrolu la analogan drataron kaj la parametran agordon de la rega reĝimo.Konfirmu doni pozitivan nombron, motoran antaŭan rotacion, kodan nombron pliigi;Donita negativa nombro, la motoro turniĝas malantaŭen kaj la kodokalkulo malpliiĝas.Se la motoro estas ŝarĝita kaj la bato estas limigita, ne uzu ĉi tiun metodon.Provo ne donas tro da tensio, rekomendinda sub 1V.Se la direkto ne kongruas, la parametroj sur la kontrola karto aŭ motoro povas esti modifitaj por fari ilin koheraj.

4. Inhibi nul drivon
En la ferma bukla kontrolprocezo, la ekzisto de nula drivo havos certan influon sur la kontrolefiko, kaj estas pli bone bremsi ĝin.Regilaj kartoj aŭ servokontrolaj parametroj por regi nulan drivon, zorge ĝustigitaj tiel ke la motora rapido proksimas al nulo.Ĉar nula drivo mem ankaŭ havas certan gradon de hazardo, do ne necesas postuli, ke la motora rapido estas absolute nula.
5. Establi fermitan buklan kontrolon
Denove, la servo-signalo estas liberigita per la kontrola karto, kaj malgranda proporcia gajno estas enigita sur la kontrolan karton. Pri kiom malgranda la gajno estas, ĝi povas esti determinita nur per sento. Se vi vere ne certas, enigu la minimuman valoron permesitan de la kontrola karto.Enŝaltu la ebligan signalon de la kontrola karto kaj la servo.Je ĉi tiu punkto, la motoro devas povi proksimume sekvi la movajn instrukciojn.

6. Agordu la fermitajn buklajn parametrojn
Agordi la kontrolajn parametrojn por certigi, ke la motoro moviĝas laŭ la instrukcioj de la kontrola karto, estas necesa, kaj ĉi tiu parto de la laboro, pli sperta, ĉi tie nur povas esti preterlasita.
Fold redaktu ĉi tiun sekcion kompare
Funkcia komparo inter servomotoro kaj paŝmotoro

Kiel malferma-bukla kontrola sistemo, paŝa motoro havas esencan rilaton kun moderna cifereca kontrola teknologio.Paŝmotoro estas vaste uzata en la cifereca regsistemo en Ĉinio.Kun la aspekto de tute cifereca aks-servo, ak-servo-motoro pli kaj pli aplikiĝas en cifereca kontrolsistemo.Por adaptiĝi al la disvolva tendenco de cifereca kontrolo, paŝa motoro aŭ kompleta cifereca servo-motoro estas uzata kiel plenuma motoro en sistemo de movado.Kvankam la du estas similaj laŭ rega reĝimo (pulsa trajno kaj direkta signalo), ekzistas signifaj diferencoj pri agado kaj apliko.Komparu pri la serva agado de ambaŭ nun.

La transdona proporcio estas: 2.0, 3.15, 3.55, 4, 4.5, 5, 5.6, 6.3, 7, 1.8, 9, 10, 11.2, 12.5;
Du-etapaj modeloj estas: NGW42, NGW52, NGW62, NGW72, NGW82, NGW92, NGW102, NGW112, NGW122;
La transdona proporcio estas: 14, 16, 18, 20, 22.4, 25, 28, 31.5, 35.5, 40, 45.50, 56, 63, 71, 80, 90, 100, 112, 125, 140, 160;

La tri-nivelaj modeloj estas: NGW73, NGW83, NGW93, NGW103-ilara paŝomotora planeda rapidumujo NGW113, NGW123 paŝomotora planeda rapidumujo;
La transdona proporcio estas: 180, 200, 224, 250, 280, 315, 355, 400











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![]()
La plej bona servo de nia spertulo pri transdona stirado rekte al via enirkesto.
nia Servo
Kontaktu
Yantai Bonway Manufacturer Co.ltd
ANo.160 Changjiang Road, Jantai, Ŝandongo, Ĉinio (264006)
T + 86 535 6330966
W + 86 185 63806647